课程设计任务及评分标准
- 课程设计按实验小组进行,为时三周,开始时间 2017 年 12 月 10日,结束时间 12 月 29日。考核时间为 2018 年 1 月 6 日(星期六)上午八点半,考核顺序抽签决定,抽签时间为 2018 年 1 月 5 日(星期五) 晚 7:30。
- 课程设计总分为 100 分,小车按要求完成指定各项功能的,可得满分为 95 分; 另外5 分作为小车速度加分。
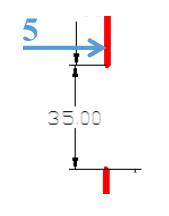
- 小车依次经过 Figure1 标注 1 号点得 15 分、 2 号点再得 10 分, 3 号点再得 10分、 4 号点再得 10分、 5 号点再得 10 分、 6 号点再得 10 分、 7 号标注点再得 10 分、 8 号标注点得 10 分、 9 号标注点得 10 分, 一共95分;还有5分为时间上的加分,即小车能在50秒内完成路线的话,可得5分。
- 若为完成指定循迹,需在轨道上面做特殊标记的,可向核心教师团队申请,批准后可以在轨道上面做出特殊标记(每个小组仅允许作出一处特殊标记,标记不得使用总长度超过 250mm 的黑胶布)。对于在指定轨迹上做出标记的小组, 小车成绩扣 10 分。
- 每组在课程设计考核时,均有两次测试机会,以最好的一次成绩作为考核成绩。每次考核的用时为 70 秒,若超出 70 秒小车还没走完路线,则强制停止,以该停止点作为小车的终点并算分。
- 若在正式考核时两次测试均失败的小组,可提供课程设计期间调试循迹小车 完成情况最好的视频(该视频需值班老师或 TA 认证)给核心教师团队,核心教师团队根据认证视频给予评分, 小车总成绩扣除 25 分作为小车稳定性成绩失分。
- 小车在循迹过程中应跟随轨道,若脱离轨道,必须在 5 秒内返回到脱离轨道前的位置,否则判定此次测试结束;并以小车脱离轨道点为最终得分点计算得分。
- 若小车在循迹过程中进入岔道, 则此次测试成绩扣 5 分。每进入一个岔道扣5 分,直到此次考试结束。
- 小车须以轨道标记顺序依次经过各得分点,否则判定此次测试结束;只计算 按顺序经过的得分点分数。
- 考试时所用循迹小车必须为实验室提供的器件所搭建(部分特殊情况请联系TA 解决),否则不得参加考试。
- 循迹小车为机器人入门项目设计课程的期末考试,请各位认真对待。考试期间严禁使用通讯工具,发现违规者当场取消考试资格!
- 考试时间为上午 8: 30 到中午 12:00,考核期间没有监考 TA 允许不得私自离开考场。考核结束的同学请耐心等候通知。
- 本次考核结束后请在下周(2018.1.10号)晚上八点前上交循迹小车报告(文件名以“第×组+姓名” 发到班长邮箱,并由班长打包整理好后发给 TA 教师团队。)
- 考核前可提出擦拭赛道的要求(避免有灰尘影响传感器灵敏度),但是不得破坏赛道。若发现违规者, 视赛道破坏情况扣除 5~25 分, 严重者直接取消考试资格!
附图
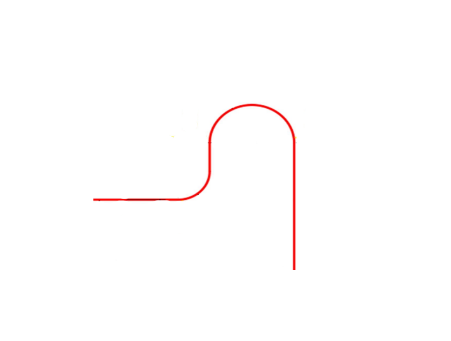
课程设计轨道如figure 1所示 :
课程设计任务解决方案
任务分析
循迹路线主要包括以下关卡:(岔道、平滑曲线、Y字型分岔、垂直岔道、断口、直角拐弯)
 |
 |
 |
 |
 |
 |
总体方案
本设计提出通过 用三个红外灰度传感器对路线进行识别,通过逻辑电路处理信号控制调整电机正反转以完成前进及转向功能,使小车能够按照规定的轨迹(黑线)完成直线、直角、弯道和岔道的转向运动并最终到达终点。
核心逻辑
将三个红外灰度传感器呈三角形排布:

方法:分析关卡,探究在各关卡时三个红外灰度传感器分别的状态。依照各状态列出真值表以设计逻辑电路。
真值表:(列出所有状况,1为检测到白色,0为检测到黑色)
传感器A 传感器B 传感器C 左轮 右轮 左轮状态 右轮状态 小车状态 1 1 0 1 1 快速正转 快速正转 快速前进 1 0 0 1 1 快速正转 快速正转 快速前进 0 1 0 1 1 快速正转 快速正转 快速前进 0 0 0 1 1 快速正转 快速正转 快速前进 1 1 1 1 1 快速正转 快速正转 快速前进 1 0 1 1 0 快速正转 快速反转 右转 0 1 1 0 1 快速反转 快速正转 左转 0 0 1 0 1 快速反转 快速正转 左转 卡诺图
左:
右:c\ab 00 01 11 10 0 1 1 1 1 1 0 0 1 1 c\ab 00 01 11 10 0 1 1 1 1 1 1 1 1 0 通过卡诺图化简后的逻辑:
左轮信号逻辑:$ L=\bar{C}+A $
右轮信号逻辑:$ R=\bar{C}+B+\bar{A} $逻辑电路:

通过逻辑电路对关卡的解决情况:
[1]在此点位时红外灰度传感器ABC将是001的状态,小车左转,避免进入右侧岔道。
[2] 在此点位时红外灰度传感器ABC将是010的状态,小车保持直线行走,避免进入左侧岔道。
[3] 在此点位时红外灰度传感器ABC将是011的状态,小车左转,通过左直角弯。(同理101时可转右直角弯)
[4] 在此点位时红外灰度传感器ABC将是111的状态,小车保持直走,一直到通过终点结束。
确认所需逻辑门元件:非门74ls041、或门74ls321。
小车各部分电路
- 芯片电源供电电路
通过lm1117稳压芯片将电压降到5v
- PWM 信号产生电路

- 逻辑电路

- 电机驱动电路

搭建测试中遇到的问题及解决方案
[1] 两电机转速不一,无法正常直行,走线时摇摆剧烈,而且在关键关卡节点有较大几率出问题卡死或乱走。
解决方法:
- 购买马达对电机内芯进行更换。
- 加上电阻使转速较快一侧的轮子慢下来。(但由于实验室中可变电阻的调节精度太差难以调整到最佳状态,而且也浪费了电能)
[2] 过直角弯时会冲出赛道,原因是小车速度太快,传感器不够灵敏,逻辑反应不过来。红外灰度传感器C还在黑线内,两侧的传感器A和B不能输出有效信号,且车轮反转速度不够快,导致小车冲出赛道。
解决方法:
- 将传感器C往前移动,提前感知弯道。(距两侧传感器连线约2.5cm)
- 调整方波占空比,使车轮反转速度与正转基本一致,使小车转向速度加快。
- 输入更低供电电压,使小车整体行进速度降低。
[3] 电压高于9v时,部分逻辑电路失效,无法完成逻辑运算。
解决方法:
- 部分逻辑门芯片的输入电压高于5v后无法辨别高低电平,由稳压芯片LM1117输出稳定5v电压供给所有逻辑电路芯片。
视频
参考文献
[1]张宝荣.数字电子技术基础(第二版)[M].北京:电子工业出版社,2015:1-38.
[2]初永丽,王雪琪,范丽杰. 模拟电子技术基础 [M].西安: 西安电子科技大学出版社, 2016:







